DPM模型
Author: [jie luo]
Link: [https://zhuanlan.zhihu.com/p/41508881]
前言
Deformable part model 为可形变部件模型,简称DPM模型。这种模型非常地直观,它将目标对象建模成几个部件的组合。 比如它将人类视为头部/身体/手/腿的组合。尽管看起来DPM非常简单,但是如何将这种intuition转化为数学模型,是非常地考验内功的(SVM,convex optimization,坐标下降法,梯度下降法)。直到2005年,这种模型才被提出来,因为这其中涉及了很多的优化/训练方法。被提出来之后,DPM大红大紫,但是深度学习技术火了之后,DPM似乎消失了光芒。如果可视化深度学习每一层的特征,可以看到深度学习似乎也在学习这些部件(人的头/手/脚)的特征,但是深度学习训练起来比较简单。而DPM则加入较多的启发式规则,变得复杂。这篇文章将会简单讲解我对DPM的了解,但是不会很细,我想在后面再写一篇关于DPM的源代码分析的文章。
什么是DPM模型
https://zhuanlan.zhihu.com/p/40960756这篇文章讲到,我们可以使用HOG+linear SVM来做人脸检测。我们可以根据图像计算出HOG pyramid,然后学习一个权重filter,然后计算这两个矩阵的内积,就会得到一个分数,我们再训练得出分数阀值就可以检测人类。但是在现实生活中,物体是有很多变化的,包括人的各种动作/车的各种形状/不同的视角和光照等等。而DPM则是一个更好的表示模型,上面这些变化对DPM影响不大。
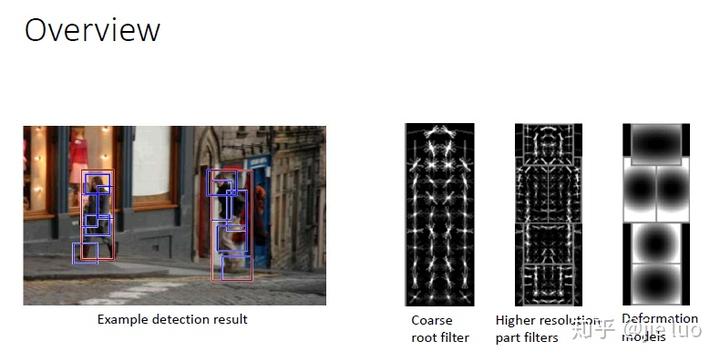
上图则给出了DPM模型的预览图。它将人类表示成头/手/大腿/小腿等部件。每个部件的位置不是固定的,也就是说可以形变的。上图左边给出检测结果,其中红框是一整个人,蓝框则是检测出的各个部件。右边则是不同的filter,其中root filter是关注整个人的,part filter是关注身体几个部件的。而deformation model则是考虑不同形变带来的惩罚,也就是说你的手不能离身体太远,否则就会扣分。而且每个部件和主体的相对位置是比较稳定的,头部在上方,手部在中间,腿在下边。下面我们就来看看作者是如何给DPM模型建模的。
如上图右边所示,一个DPM模型包括一个root filter
那么DPM模型用一个得分函数来判断是否存在目标对象:
其中第一项是每个filter跟feature vector的点乘,用来判断像不像人。第二项是形变系数点乘形变特征,用来确定形变代价,b是偏置值,用于混合模型的多个component的比较(混合模型后面会说)。
那么对于一个假定的位置z,其对应的分数可以记为:
其中,
以上就是主要的DPM 模型。
DPM的物体检测
按照文章的思路,我们先讨论如何做detection。
这里我们假设我们已经通过训练得到了未知量
首先root location的分数等于所有部件遍历所有可能位置组合得到的最好情况的和。
那么root location分数高的就表示可能存在人,低的就不存在人,通过这种方式我们就检测出人。
但是对于一个特征金字塔(HOG pyramid),root location有很多位置,而每一个root location又有很多个不同的部件组合,所以计算量是非常大的。作者想出了一个办法,就是使用动态规划和距离变换的技术使计算复杂度降低到了o(nk),其中n是root location的个数,k是部件的个数。
关于距离变换的技术,大概思路是先计算每一个部件的response图,这是提前计算的。它通过filter 点乘 feature得到。然后给定一个root location(x,y),我们计算能够带给root location最大得分的偏移量(dx,dy)。
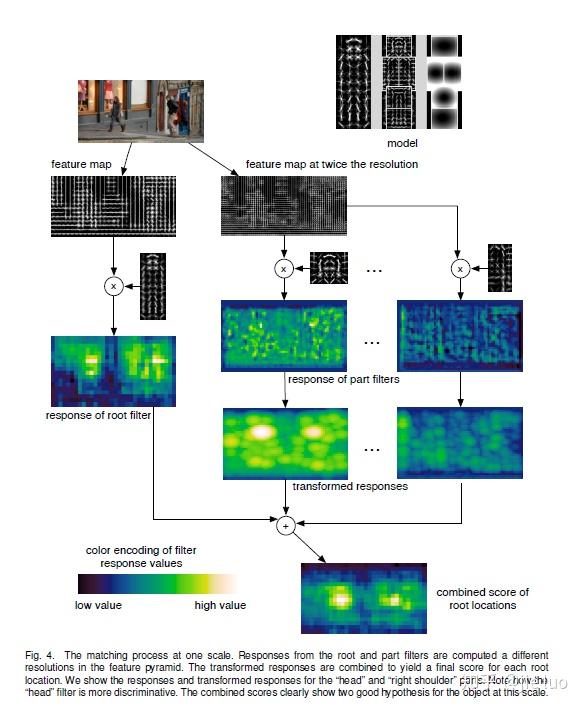
上图给出检测的总流程。给定一个DPM 模型,给定一张图像,输出是否存在人,如果存在,人在哪里。
首先计算图像对应的特征图(feature map),这里用到了HOG特征。然后计算root filter的response以及part filter 的response。对于每一个part filter response,需要做距离变换,因为要考虑形变代价。再然后结合各个部分的response加上偏置值就得到了root location的综合得分,这个得分就可以判断是否有人了。
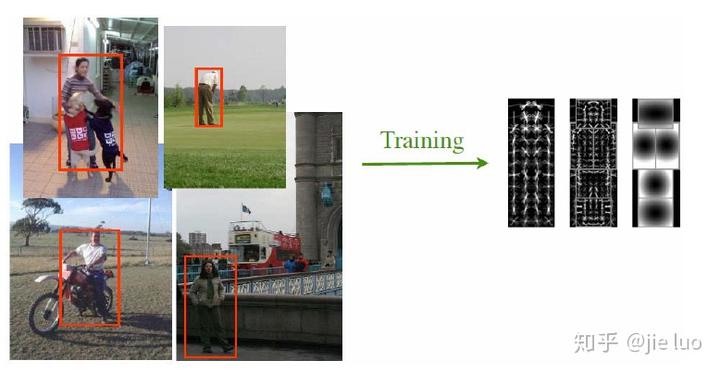
好,现在将怎么训练得出
DPM的训练
训练的要求:
- 给出一个数据集,包含正例和反例。其中正例会给出人所在的方框。
- 人的身体部位位置不会给出,也就是说,part location的位置是不知道的,所以是latent。我们必须通过机器学习算法去找到身体部件位置的最佳值。
- 目标是学习得出
,即 每一个filter权重,每一个形变代价,以及偏置值b。
对于一个样例x,分类器将会通过以下公式打分:
其中
给出训练集:
其中
作者类比传统SVM,给出了训练需要优化的目标函数:
其中第一项叫做正则项,就是说未知参数不能按比例无限增大。第二项是损失函数,C控制两项之间的权重。
由于包含了latent variable,因此称这种分类器为latent SVM。
在讨论怎么训练之前我们要说一下latent SVM的半凸性。这里默认大家都知道什么是凸函数(简单说就是两边高,中间低的函数图像)。
latent SVM的semi-convexity
- 对于负样本,y的值是-1,损失函数变成
,根据公式(6),对于每一个给定的z, 都是 的线性函数。那么所有线性函数的最大值将会是这样子的:

所以是一个凸函数,那么整个公式(7)也将是一个凸优化的问题。所以是很好解的。
- 对于正样本,y的值是1,损失项将会变成凹函数,那么整个公式(7)的凹凸性将无法确定。但是作者在这里用了一个取巧的办法,就是把latent variable变成已知的,也就是说身体部位的位置限定为一个值,那么这时
将会变成线性函数。公式(7)变成凸函数+线性函数的结构,因此也是凸函数。这就能够最小化目标函数了。
- 假设身体部件的位置都是固定的,然后用传统的SVM来训练身体部位分类器。
- 使用训练得到的分类器,在每个训练样例中找到最佳的身体部位所在位置。
通过这样的两步迭代,就可以最终学习到
关于负样本
负样本是使用一个叫做收集困难的负样本来实现的。就比如我们训练做题都是多做错题来训练的一样。负样本有很多,但是我们只需选择那些被误识别为正例的反例,就可以使SVM分类器快速收敛。
关于混合模型
因为视角不同,将会导致不同的形状(比如人的正面和侧面)。就好像盲人摸象一样。那么就需要多训练几个DPM,最后组成一个mixture model,这样才能准确识别到目标物体。
参考文献及链接:
1:http://cs.brown.edu/people/pfelzens/papers/latent.pdf
2:https://ieeexplore.ieee.org/abstract/document/5255236/
3:https://youtube.com/watch?v=2DihVLm8v38
4:https://pdfs.semanticscholar.org/presentation/65f0/408feb72fcdcfb2e60f3435b61495e4ebd21.pdf